变频点焊机的不同机型摇臂型点焊机

1.摇臂型点焊机
摇臂型点焊机是最简单的固定式点焊机。它是利用杠杆原理由上电极臂施加电极压力,上、下电极臂为长的圆柱形构件,既传递电极压力,又传递焊接电流。上电极绕上极臂的支承轴作圆弧运动,当上、下电极与工件接触加压时,上、下电极臂必须处于平行位置,才能获得良好的加压状态。电极臂必须有足够刚度,否则电极间会发生滑移,引起熔核飞溅。
它有三种操作方法:脚踏、气动和电动机-凸轮。
(1)脚踏式摇臂点焊机
图4-2-11所示是典型脚踏式摇臂点焊机。摇臂杆3能绕支承轴2转动,当踩踏板1时,上电极向下压向下电极,施加到踏板上的力由弹簧4传递到摇臂杆上,电极压力是通过螺母5对弹簧4压缩的程度进行调节。通电的开关由掣子6触发,通电时间长短由焊工掌握。焊后由弹簧7使上电极退出、复位。
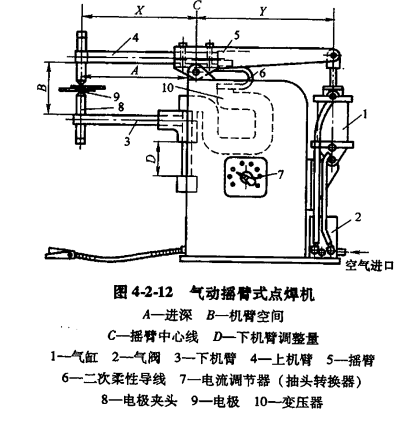
(2)气动式摇臂点焊机
用气缸代替脚踏式点焊机的脚踏杆、连杆和弹簧。它实际上是用气压力代替人的脚踏力,如图4-2-12所示。气缸行程须与机臂空间B成比例,气缸直径须与所需电极压力和进深A成比例。由气缸提供的焊接压力与空气压力成正比,并由减压器控制。
这类点焊机最适于需要最小装配时间的中、大批生产用。国产焊机容量为60~100kVA,一般配用KD7型控制器,可焊接2.5mm+2.5mm钢板。
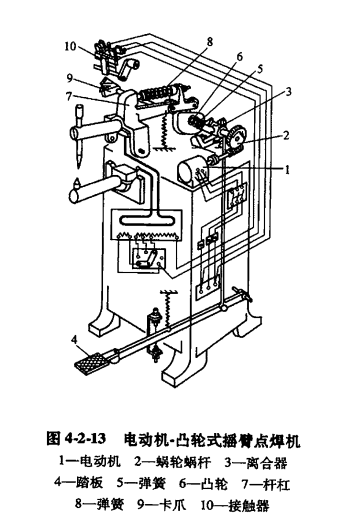
(3)电动机-凸轮式摇臂点焊机
典型的电动机-凸轮摇臂点焊机如图4-2-13所示,杠杆7由电动机1驱动的凸轮6代替脚踏力或气缸压力来推动而进行焊接。机臂的空间由焊接凸轮升量和进深决定。焊接压力取决于弹簧8的压缩量和杠杆力臂比。图中3为离合器,由踏板4控制,电流由卡爪9拨动接触器10而导通。这类点焊机的准备和调节比脚踏式和气动式困难,它适用于大批量生产,或没有压缩气源的场合。
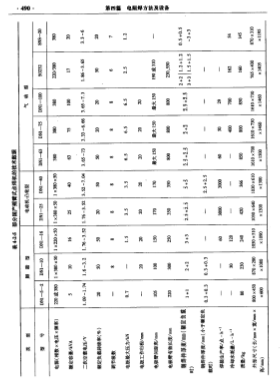
(4)摇臂式点焊机的技术数据
表4-2-5为国产摇臂式点焊机的技术数据。
值得注意,摇臂式点焊机无论如何操作,随着上下机臂伸长的增加,其电极压力、焊接电流都会有所降低。